201. Accelerometer Sensing Pack

The goal of the Accelerometer Sensing Pack project is to develop a small device that can record acceleration data at a specific resolution for a minimum of one week. The device must be battery powered and all data collected must be power safe. The purpose of the device is to allow Kimberly-Clark to be able to test how shock and vibrations affect their products. To complete this project, the team has designed a printed circuit board with a microcontroller, accelerometer, and memory device as well as written and tested code for the microcontroller to be able to collect accelerometer data and store it in a way that can be viewed later.

205. Calculation of radiation view factors via high-performance ray tracing on HPCs and GPUs

The goal of the view factor calculation project is to research, implement, and evaluate a few third-party ray tracing libraries. The main purpose of the resulting data is to inform TAI of possible performance enhancements that could be made to their current view factor calculation software. Currently, the team is working through the final phase of the project, which includes running benchmark tests on the two libraries against TAITherm and collecting and analyzing the results.

214. Low Cost Motor Controller
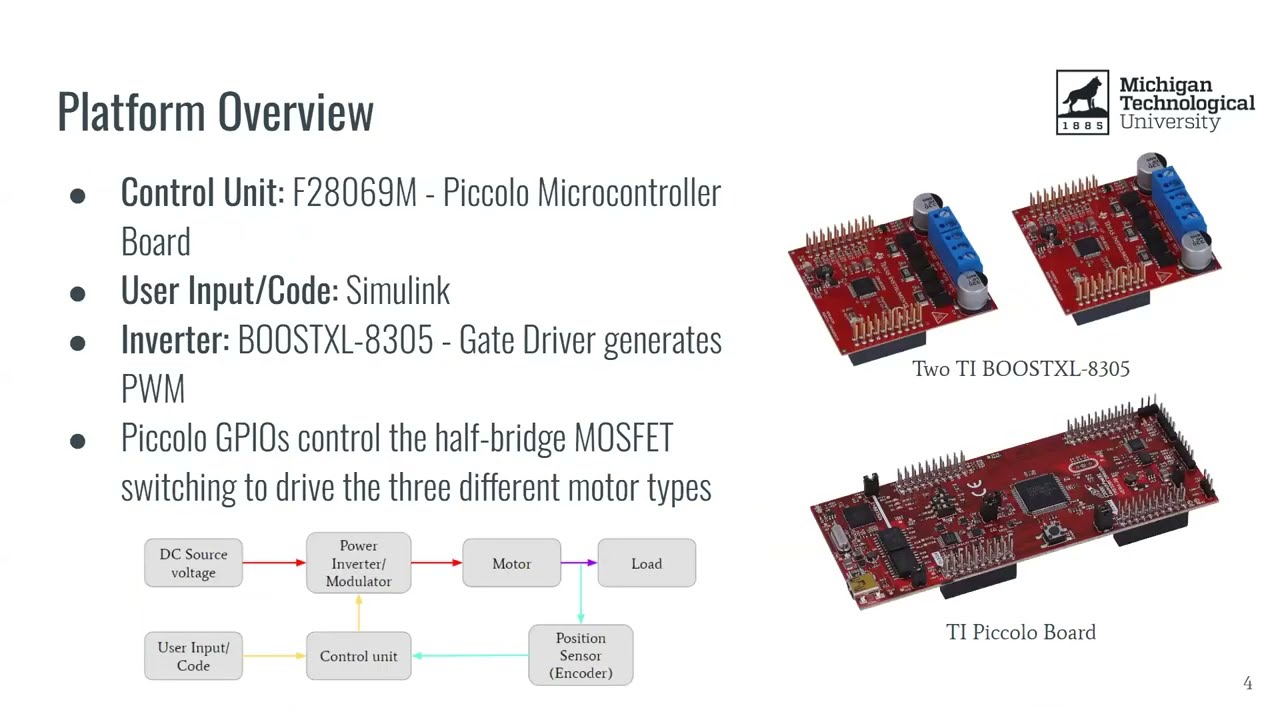
Michigan Technological University’s Electrical and Computer Engineering Department has a need for a portable and modular motor drive system, our team is continuing the work done by the last year's senior design team. This system should be equal in functionality to the current in-lab motor drive unit to demonstrate the capabilities of the department’s power labs, Power Electronics and Electric Machines and Drives (EE4228 and EE4220). Such a system can be built upon a microcontroller development board for a low-cost. The team's primary goal is to develop a low-cost and portable alternative tailored for the SB35 lab and beyond. The solution leverages the Texas Instruments LaunchPad and motor control BoostPack.

220. Monitoring Harmonic Distortion Levels in Power Systems
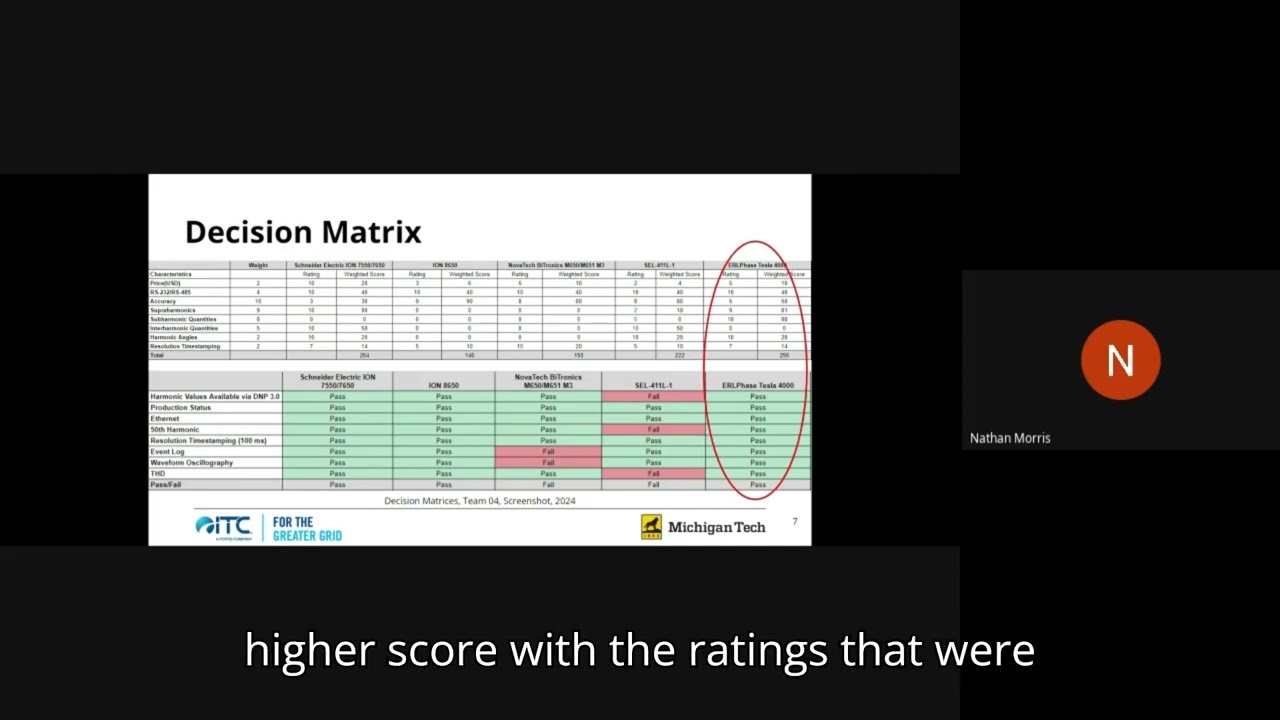
The monitoring harmonic distortion in power systems team was tasked with developing a system of devices that could be used to monitor increasing levels of harmonic distortion in the United States' power systems. The team aimed to use devices that are standard to the sponsor, ITC Holdings, to avoid increased costs associated with the project. The project uses an ERLPhase Tesla Digital Fault Recorder to collect data on voltage and current, then a NovaTech Remote Terminal Unit to process the data. When determined that an alarm is necessary, an alert is sent to the ITC Holdings control room for operators to handle the issue.

229. Republic Mountain Lake Renewable Energy Substation Evaluation

The objective of the Republic Mountain Lake Senior Design Team is to develop a 138/34.5 kV substation at the Republic Mountain Mine site, which will be integrated with the Alternative Energy Enterprises (AEE) renewable energy generation system. This substation aims to facilitate efficient and sustainable power generation to the residents of Republic and the Upper Peninsula of Michigan. The design is to be used by Republic Mountain Lake LLC. as they consider building a renewable energy facility at the Republic Mountain Lake location.

235. Real-time Hazard Evaluation and Mitigation Instrument (R.H.E.M.I)

Our MTU ECE Senior Design Team is participating in the SICK LiDAR Challenge. For this challenge, our team must utilize SICK’s Multiscan100 LiDAR in our own unique design project. Our design team has proposed a R.H.E.M.I, or Real-time Hazard Evaluation and Mitigation Instrument, relying on tactile pressure points to alert the user of nearby potential hazards. Along with the LiDAR, the device is utilizing an NVidia Jetson Nano processor, several actuators, and vibration pads to warn the user of nearby obstructions and hazards to carry out the device's intent.

236. Waterfowl Retrieval System - Fowl Fetcher

The goal of the waterfowl retrieval system is to provide hunters with a safer alternative to using hunting dogs. The robot needs to be able to safely locate a dead duck and return it to the hunter with minimal outside control. Currently the project has a working platform of a robot that can traverse different types of terrain easily. The focus for this phase of the project is to integrate GPS tracking, image recognition, and improve on last year's design.

237. Waupaca Foundry Automated Cast Cleaning
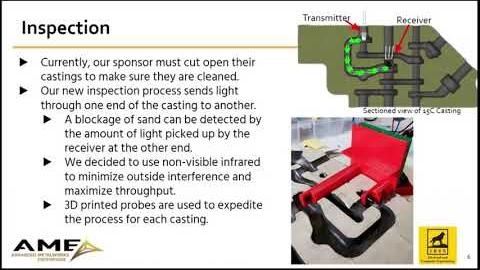
The goal of the Waupaca Foundry Automated Cast Cleaning project is to take a cast metal part with complex internal passages and autonomously remove all core sand from the passages. The project should also include the ability to verify that the passages are clear of any blockages. These processes are to be developed entirely by the team as there is no manual process for clearing or inspecting the passages due to the size and configuration of them. This project will allow Waupaca Foundry to enter several parts into production and ensure quality to their end customers. The team is currently developing the processes for both decoring and inspecting the parts individually.
