
From the water’s surface, you can easily appreciate the beauty, vastness, and intrigue of the Great Lakes. Yet a subsurface dive truly begins to unravel the mysteries they hold. With the Great Lakes Research Center’s fleet of subsurface vehicles, researchers can do far more than simply scratch the surface; they dive 1,000 feet to the bottom of the lakes, explore underwater topography, and even map subsurface features in three dimensions.
The GLRC’s subsurface fleet consists of five vehicles—each with its own specialties and cutting-edge technologies.
Remotely Operated Vehicles (ROVs)
ROVs let researchers peek below the surface—often many hundreds of feet—without ever leaving the shore or their research vessel. ROVs are controlled by an operator who dictates the vehicle’s movements and functions remotely.
BlueROV2 Heavy
The Center operates two Blue Robotics BlueROV2 Heavy ROVs. These are versatile and highly customizable underwater vehicles designed for inspection and exploration, enhanced by advanced navigational and imaging capabilities. They are configured with a range of sensors and control systems, enabling precise underwater operations.
- Equipped with a Sonardyne Micro Ranger/Nano USBL (Ultra-Short Baseline) for global positioning and a Waterlinked DVL (Doppler Velocity Log) for accurate velocity, height, and position holding
- Features a downward-looking HD camera for detailed visual inspection and a laser scaler for precise dimensional measurements
- Integrated with Mission Robotics controls for advanced ROV operation and automation.
- Gripper with sediment sampler
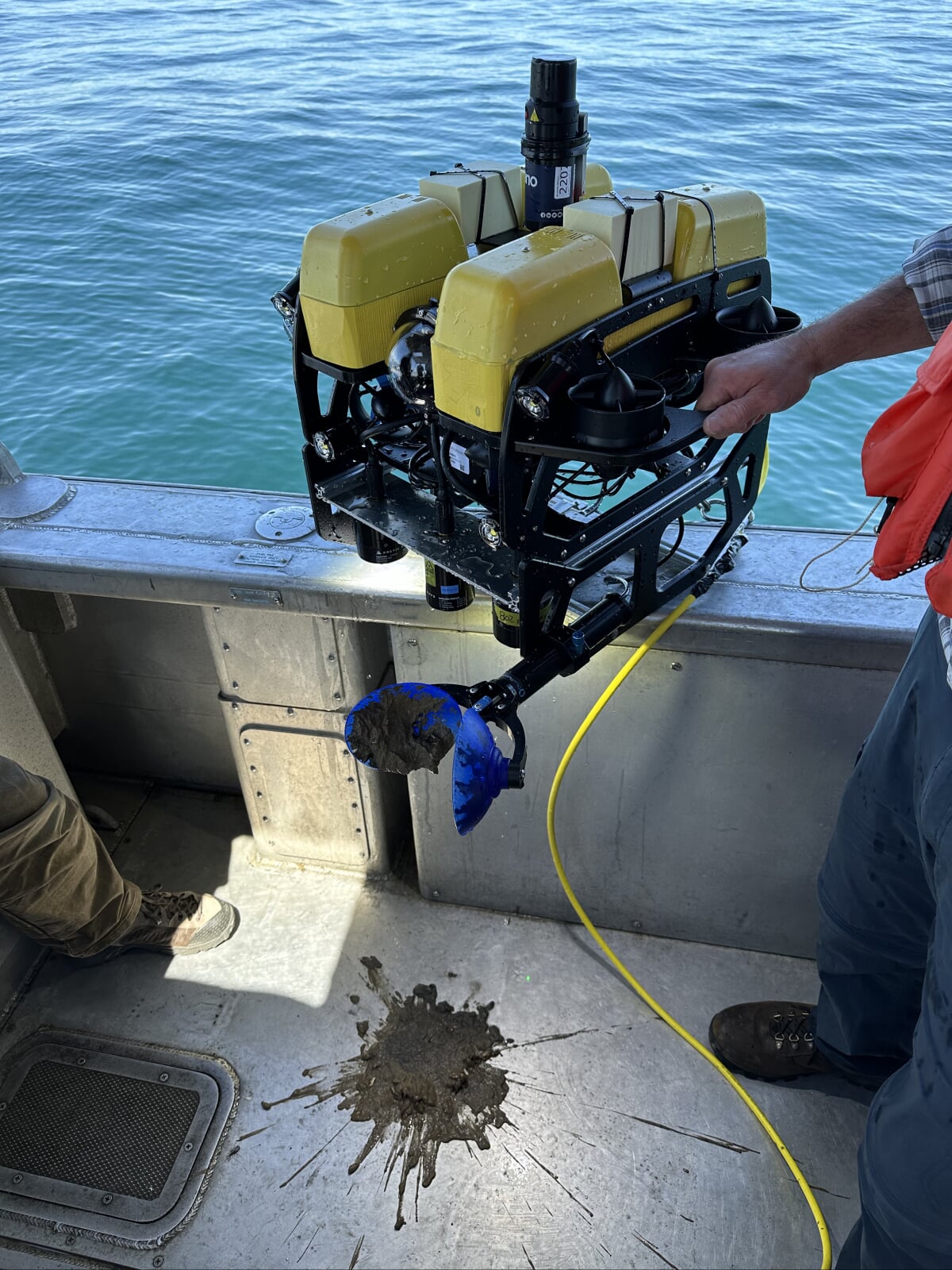
Outland 1000
The Center maintains and operates two Outland 1000 ROVs. These vehicles can dive to depths of more than 1,000 feet. Both are fully equipped with a collection of sampling tools, including:
- Single-function arm for grabbing and cutting
- Two color and one black-and-white low-light video cameras
- LED flood lights
The Outland 1000 ROVs are designed for light-to-medium work tasks and selective sampling. Both vehicles can be outfitted with a USBL acoustic positioning beacon to aid in navigating to and recording positions of interest.
Fully Autonomous Underwater Vehicle (AUV)
AUVs offer the ability to survey, explore, and collect data without requiring input from an operator. By controlling their movement themselves, AUVs give researchers a new way to study the Great Lakes—with no need for human control.
IVER 3
Our L3 Oceanserver IVER 3 580 is truly a first-of-its-kind AUV, proudly displaying serial number 001 to confirm it. GLRC researchers have access to a host of technologies, including:
- Allied Vision Mako downward-looking video/still digital camera
- 30,000 lumen offset LED lighting
- EdgeTech 2205 dual-frequency side scan sonar with simultaneous interferometric swath bathymetry
- Teledyne RDI Explorer Doppler Velocity Log with Acoustic Doppler Current Profiler capability
- Forward looking obstacle avoidance sonar
The IVER 3’s sonar system uses a broad range of EdgeTech side-scan sonar frequencies (600 and 1,600 kHz), making it a very versatile sonar imaging system. The ultra-high-resolution EdgeTech sonar provides unrivaled imaging resolution and full three-dimensional mapping capabilities.
IVER 3’s more-than-300-foot-depth diving capabilities coupled with its 8 hours of operating time provides unsurpassed underwater survey capabilities to Center researchers—and a winning combination for the Great Lakes.